
全国嵌入式大赛 RT-Thread 选题指南发布:虚拟化+具身智能+AI套件,挑战嵌入式新高度 | 论道大赛
全国大学生嵌入式芯片与系统设计竞赛是由中国电子教育学会主办。大赛旨在提高全国高校学生在嵌入式芯片及系统设计领域和可编程逻辑器件应用领域的自主创新设计与工程实践能力,培养具有创新思维、具备解决复杂工程问题能力且拥有团队合作精神的优秀人才,在活跃校园创新创业学术氛围的同时,推进高校与企业人才培养合作共建。本赛事目前是全国普通高校大学生竞赛排行榜榜单内赛事,属教育部A类竞赛。
为推广RT-Thread大学计划,促进RT-Thread操作系统引入课堂教学,提升学生利用国产RT-Thread操作系统开发设计作品,构建嵌入式软件工程师的系统思维,RT-Thread连续多年支持全国嵌入式芯片与系统设计竞赛,并深度参与该赛项的各种工作。今年RT-Thread继续以协办单位的名义参与并开设RT-Thread赛道,首次把行业前沿的技术引入赛道中,并针对所有参赛中使用了RT-Thread的作品进行单独评审。RT-Thread在今年全国嵌入式芯片与系统设计竞赛的选题指南如下:
赛题方向一:RT-Thread虚拟化混合部署与具身智能方向(重点推荐)
具身智能(Embodied Intelligence)是将人工智能深度融入物理实体(如机器人)的关键技术方向,使其具备自主感知、决策、学习和与复杂环境动态交互的能力。传统嵌入式系统往往难以同时满足高实时性控制、安全隔离以及复杂AI算法运行的需求。RT-Thread虚拟化混合部署平台基于瑞芯微RK3588高性能处理器(8核64位架构、集成6TOPS NPU),通过虚拟化技术实现Ubuntu/Linux(负责“大脑”级复杂AI计算)与RT-Thread实时内核(负责“小脑”级高可靠控制)的协同运行,在统一硬件平台上提供强实时性、高功能复杂性、安全隔离与开发敏捷性的完美平衡。赛题要求基于RT-Thread虚拟化混合部署系统开发完整的行业应用案例。即赛题中必须使用RT-Thread虚拟化平台混合部署方案。
01
参考应用1:电力设施智能巡检机器人
应用背景:随着我国新型电力系统建设的推进,电网规模日益扩大,设备复杂度急剧增加,对供电可靠性的要求达到了前所未有的高度。电力设施智能巡检机器人具备自主移动、智能感知、执行关键维护操作的功能,可实现变电站、配电房“无人值守”或“少人值守”。
作品要求:利用RT-Thread虚拟化混合部署,Linux系统运行智能算法或模型,实现路径规划、电力设施状态感知、数据存储、人机交互等功能,RT-Thread根据路径规划、设备状态执行行走、开关设备等关键操作。
02
参考应用2:RT-Thread混合部署下的室内智能配送机器人
应用背景:在医院、酒店、餐厅、仓库等室内场景中,物品配送需求频繁且路径复杂,传统人工配送效率低、成本高。智能配送机器人可实现自主导航、动态避障与精准对接,支持多楼层/多房间物品运送,能够显著提升服务效率、降低人力投入并改善用户体验。RK3588强大的NPU与多传感器配置特别适合此类需要实时感知与AI决策的具身智能应用。
作品要求:基于RK3588的RT-Thread虚拟化混合部署平台,利用四轮麦克纳姆轮底盘实现全向精准移动。Linux侧运行复杂AI算法,包括基于激光雷达与深度相机的SLAM建图、路径规划(A*/RRT等)、动态障碍物检测与避障、目标点识别(二维码/房间标识)以及语音交互/人脸识别;RT-Thread侧负责高实时性任务,如多传感器融合定位、电机PID精准控制、姿态稳定与紧急停障。要求在模拟室内环境中实现自主配送任务,导航定位精度±5cm,动态避障响应时间≤0.5s,停车稳定性(托盘物品晃动≤2cm),支持APP/语音下单与实时状态可视化界面。方案需兼顾不同负载、地面摩擦变化的鲁棒性,易于调试与扩展。
03
参考应用3:RT-Thread 混合部署下的起重机智能防摇摆控制器
应用背景:起重机作为现代工业物料搬运的核心装备,其吊运过程中的负载摇摆现象一直是行业痼疾。在钢铁、港口、航天装配等高精度作业场景中,由惯性引发的负载大幅度摆动不仅严重降低搬运效率、延长作业周期,更对现场人员安全、设备稳定性及精密货物(如风力发电机叶片、飞船舱段)构成重大威胁。传统防摇摆技术依赖操作员经验进行“点动”调整,对技能要求高且效果不稳定;而基于模型预测的先进控制策略虽在理论上可行,却受制于实际工况的复杂性(如风力扰动、钢丝绳长度变化、负载质量未知),难以实现稳定可靠的工程化应用。因此,研发一套能自适应环境、智能抑制摆动并融入现有起重机系统的解决方案,对于提升行业自动化水平、保障安全生产具有迫切的现实意义和商业价值。
作品要求:利用RT-Thread虚拟化混合部署开发一套智能起重机防摇摆控制系统,Linux系统能基于传感器实时数据(如吊钩视角视频、钢丝绳倾角、电机编码器反馈等),通过先进算法在线识别或预测负载摆动,精度±0.1°,RT-Thread根据摆动角度运行控制算法,实现起重机小车移动,抑制摆角,要求停车时摆角≤0.2°,自动模式下定位精度±1cm,提供可视化人机界面,实时显示摆动状态、控制参数及作业效率统计。方案需兼顾算法鲁棒性(应对不同负载、绳长变化与微风扰动)与工程可行性。
赛题方向二:RT-Thread Smart方向
RT-Thread Smart(RT-Smart)是RT-Thread的高级版本,支持MMU内存保护与用户态多进程机制,能够在资源受限的嵌入式设备上实现复杂AI应用与实时任务的安全隔离与高效并行。参赛者使用RT-Thread Smart操作系统与RT-Smart AI套件(基于K230处理器),开发嵌入式人工智能应用作品,包括但不限于智能视觉识别、语音交互、多模态监护、智能安防等方向。该选题要求利用RT-Thread SmartAI套件,利用RT-Smart的多进程隔离优势,将AI推理、媒体处理、实时控制与人机交互等任务分离,提升系统鲁棒性与实时性,具有较强的工程实践性和创新空间,非常适合嵌入式系统设计竞赛。
01
参考应用1:轻量级智能跌倒检测监护系统
应用背景:随着人口老龄化,独居老人安全问题日益突出,跌倒是导致老人受伤甚至致命的主要风险。传统可穿戴设备易遗忘或电池耗尽,而基于视觉的非接触式跌倒检测系统可实时监控室内活动,一旦检测到跌倒即可发出警报并推送通知给家属。K230强大的KPU支持高效运行轻量级姿态估计或跌倒分类模型,结合RT-Thread Smart的多进程机制,可将计算密集的AI推理与实时警报/交互分离,避免高负载导致系统延迟或崩溃。该方向在边缘AI设备中有较多成熟开源模型与社区案例(如基于YOLO+关键点或专用跌倒检测网络),实现难度适中、实用性强。
作品要求:基于K230的RT-Smart AI套件,构建一个智能跌倒检测监护系统,至少包含两个独立进程:1) 视频采集与显示进程:实时捕获摄像头数据(支持720P@30fps),在TFT屏幕上预览画面,并可选运行轻量级RTSP/HTTP服务器实现远程视频查看;2) AI事件检测进程:利用KPU加速运行轻量级视觉模型(如基于关键点提取的姿态估计或专用跌倒分类模型),实时检测人体跌倒事件(准确率≥90%在标准室内光照条件下),检测到时通过IPC通知采集进程叠加OSD标识(如“Fall Detected!”)、触发音频警报(蜂鸣器或语音播报)、保存事件视频片段至SD卡,并通过Wi-Fi推送通知至手机/云端。要求满负荷运行时,从跌倒发生到警报触发的端到端延迟≤500ms,系统稳定不崩溃,支持按键手动复位警报与本地事件日志查看。
02
参考应用2:智能人脸识别门禁/考勤系统
应用背景:传统门禁依赖卡片或密码,易丢失/泄露;智能人脸识别门禁具备更高安全性与便捷性,广泛应用于办公室、宿舍、社区等场景。K230强大的KPU支持高效人脸检测与识别模型运行,结合RT-Thread Smart的多进程隔离,可将计算密集的AI推理与实时控制/交互分离,避免AI负载影响开门响应或系统稳定性。实际案例包括K230平台的人脸门锁、考勤机与活体检测应用,具有成熟开源模型支持,便于学生快速实现。
作品要求:基于K230的RT-Smart AI套件开发智能人脸识别系统,至少包含三个进程:1) 视频采集与显示进程:实时捕获摄像头数据(720P),在TFT屏幕上预览并提供按键/触摸交互界面;2) AI人脸处理进程:运行KPU加速的人脸检测+识别模型(支持注册10-50张人脸),识别准确率≥95%(正常光照条件下),可选集成简单活体检测防照片攻击;3) 事件控制进程:接收AI结果,通过IPC通信执行开门模拟(GPIO控制继电器/蜂鸣器)、记录考勤日志至SD卡,并支持Wi-Fi推送识别事件通知或Web界面查看日志。要求识别响应时间≤500ms,陌生人入侵时触发警报,多进程间内存隔离确保AI进程异常不影响控制与显示。方案需兼顾不同光照/角度的鲁棒性,支持人脸库动态注册。
03
参考应用3:轻量级视频流媒体服务器
应用背景:智能门禁、婴儿监护等IoT设备需要将本地摄像头画面实时推送至手机App,同时还需处理移动侦测等AI任务。若将所有功能置于单个进程,视频编码的波动会影响AI响应的实时性。RT-Thread Smart的进程允许将高负载的流媒体服务与关键事件处理分离,为上述应用提供了解决方案。
作品要求:使用RT-Thread Smart构建一个视频流媒体系统。系统至少须包含两个主要进程:1) 采集与推流进程:捕获摄像头数据,并运行一个轻量级RTSP服务器发布视频流;2) AI事件进程:对同一视频源进行移动侦测,当发现移动时,通过IPC通知推流进程,在视频流中叠加一个“Motion Detected!”的OSD标识,并保存快照至SD卡。要求在推流进程满负荷运行(1080P@15fps)时,从移动发生到OSD叠加完成的端到端延迟应低于300ms,且两个进程均不应发生卡死或崩溃。
04
参考应用4:AGV车队管理及交通调度边缘服务器
应用背景:在大型智能仓储中,数十台AGV协同作业需一个本地的“交通调度服务器”,负责处理所有AGV的实时状态、规划无碰撞路径、解决死锁。该服务器对多任务并行处理能力和网络吞吐量要求极高,且任何调度线程的阻塞都可能导致现场交通瘫痪。RT-Thread Smart可作为这个边缘服务器的操作系统,利用其多进程能力,将高优先级的实时交通裁决、计算密集型的路径规划和高吞吐的车辆通信管理分配至不同进程,并通过内存隔离确保某个模块(如通信解析)的异常不会扩散至整个调度系统。
作品要求:基于RT-Thread Smart开发AGV车队管理及交通调度边缘服务器,至少实现3台AGV的管理及调度,至少包含三个进程:通信进程负责AGV的状态收发;调度进程运行核心调度算法,根据车辆状态计算指令;监控进程提供Web界面显示地图和车辆实时位置。
赛题方向三:自主选题
01
赛题要求
利用本届大赛RT-Thread指定的硬件平台作为主控,搭载RT-Thread操作系统设计开发的任何作品。本次大赛的硬件产品具有RT-Thread操作系统的适配,可在RT-Thread github或gitee仓库BSP目录下找到对应的BSP使用;STM32的开发板,推荐采用RT-Thread Studio 开发环境进行开发;
02
赛事硬件平台
RT-Thread虚拟化混合部署与具身智能套件
硬件平台采用瑞芯微RK3588 八核 64 位处理器(4×Cortex-A76 + 4×Cortex-A55,集成 6TOPS NPU),提供强大的计算能力以支持复杂的AI算法实时运行。感知系统配备深度相机、激光雷达以及高精度惯性测量单元(IMU),实现环境三维建模、障碍物检测与高精度位姿估计。底盘采用四轮麦克纳姆轮设计,支持全向平移、原地旋转等灵活运动方式,能够在复杂室内外环境中实现精准运动控制。通过RT-Thread虚拟化技术,本系统可在同一硬件平台上高效运行多个隔离的实时任务与AI应用,包括但不限于:基于激光雷达与深度相机的 SLAM(即时定位与地图构建)、路径规划与运动控制算法、视觉目标检测、跟踪与语义分割、多传感器融合的自主导航与避障等。
该平台特别适合开发搭载多传感器(深度相机、激光雷达、IMU等)和全向运动底盘(四轮麦克纳姆轮)的具身智能机器人,能够高效实现SLAM、路径规划、视觉感知、多传感器融合等功能。参赛者可基于此平台开发具身智能应用作品,包括但不限于智能巡检机器人、服务配送机器人、人机交互助手、多智能体协同物流系统等,具有较高的技术深度、创新空间和工程实现性。

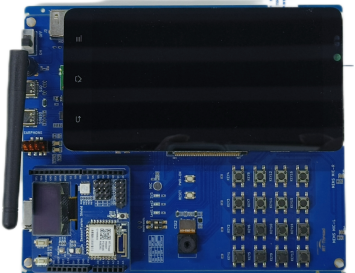
RT-Smart AI套件
RT-Smart AI套件是基于RISC-V架构处理器芯片定制的开发板,采用全新的多异构单元加速计算架构,集成了2个高性能高主频RISC-V处理器,内置新一代KPU(Knowledge Process Unit)智能计算单元,具备多精度AI算力,支持通用的AI计算框架。开发板具备多种外设接口,以及2D、2.5D等多个标量、向量、图形等专用硬件加速单元,可以对多种图像、视频、音频、AI等多样化计算任务进行全流程计算加速,具备低延迟、高性能、低功耗、快速启动、高安全性等多项特性。开发板支持外设包括:摄像头、矩阵按键、音频输入输出、Wi-Fi、USB Host+Device、屏幕、传感器拓展板等。
英飞凌系列开发板:英飞凌Edgi-Talk套件与POSC6套件

瑞萨系列开发板:RA8P1Titan Board与机器视觉Vision Board 开发板

STM32系列开发板:星火 1 号开发板与ART-PI开发板
嵌入式大赛服务指南
嵌入式大赛套件购买链接:https://item.taobao.com/item.htm?id=1027570672815
大赛技术支持交流群:838028162(QQ群)
联系人:罗齐熙 13632716562(微信同号)